
Yolo v3已過時了,本篇只是記錄而以。請參照 v4 or v7 之說明
安裝套件
pip install tensorflow matplotlib Pillow opencv-python opencv-contrib-python
安裝YOLOV3
YOLO只是一個演算模型,此模型只說明第一步用啥演算法,第二步…..。這些演算法全部放在 yolov3.cfg 這個檔案裏面。所以不算是一個sdk。
不過YOLO提供了一些函數方便我們的app可以調用,這些函數放在yolo.py檔安及yolo3目錄中。官網提供的這些函數都是採用 Tensorflow v1的代碼,無法在 Tensorflow v2的版本執行。本人已將官網的代碼全部轉成v2的版本,且可以直接在pycharm之下直接執行,載點如下
yolo3_for_tf2 <==todo
請將yolo3_for_tf2.zip解開,將裏面的檔案及代碼 copy到專案之下,裏面有font, yolo3目錄及 settings.py convert.py yolov3.cfg yolo.py…..
下載權重
權重,其實就是訓練後的模型資料,這些資料也就是日後偵測新物件時要載入的模型。官網有事先訓練完成的模型,可辨識80種物件,下載網址如下。請將下載後的yolov3.weights檔案 copy 到專案之下即可。
wget https://pjreddie.com/media/files/yolov3.weights
轉換權重
YOLO 官網預訓練的權重為yolo格式,但我們目前是使用 tensorflow .keras,所以需使用如下代碼,將權重轉換成 .h5的keras格式。
請注意, .h5這個權重檔案,就是等會要偵測的模型,而且也是日後要訓練自已模型的重要依據,絕對不能刪除
h5權重轉換.py
#! /usr/bin/env python
import configparser
import io
from collections import defaultdict
import numpy as np
import tensorflow.keras.backend as K
from tensorflow.keras.layers import (Conv2D, Input, ZeroPadding2D, Add,
UpSampling2D, MaxPooling2D, Concatenate)
from tensorflow.keras.layers import LeakyReLU
from tensorflow.keras.layers import BatchNormalization
from tensorflow.keras.models import Model
from tensorflow.keras.regularizers import l2
config_path='yolov3.cfg'
weights_path='yolov3.weights'
output_path='model_data/yolo.h5'
def unique_config_sections(config_file):
section_counters = defaultdict(int)
output_stream = io.StringIO()
with open(config_file) as fin:
for line in fin:
if line.startswith('['):
section = line.strip().strip('[]')
_section = section + '_' + str(section_counters[section])
section_counters[section] += 1
line = line.replace(section, _section)
output_stream.write(line)
output_stream.seek(0)
return output_stream
def main():
# Load weights and config.
print('Loading weights.')
weights_file = open(weights_path, 'rb')
major, minor, revision = np.ndarray(
shape=(3,), dtype='int32', buffer=weights_file.read(12))
if (major * 10 + minor) >= 2 and major < 1000 and minor < 1000:
seen = np.ndarray(shape=(1,), dtype='int64', buffer=weights_file.read(8))
else:
seen = np.ndarray(shape=(1,), dtype='int32', buffer=weights_file.read(4))
print('Weights Header: ', major, minor, revision, seen)
print('Parsing Darknet config.')
unique_config_file = unique_config_sections(config_path)
cfg_parser = configparser.ConfigParser()
cfg_parser.read_file(unique_config_file)
print('Creating Keras model.')
input_layer = Input(shape=(None, None, 3))
prev_layer = input_layer
all_layers = []
weight_decay = float(cfg_parser['net_0']['decay']
) if 'net_0' in cfg_parser.sections() else 5e-4
count = 0
out_index = []
for section in cfg_parser.sections():
print('Parsing section {}'.format(section))
if section.startswith('convolutional'):
filters = int(cfg_parser[section]['filters'])
size = int(cfg_parser[section]['size'])
stride = int(cfg_parser[section]['stride'])
pad = int(cfg_parser[section]['pad'])
activation = cfg_parser[section]['activation']
batch_normalize = 'batch_normalize' in cfg_parser[section]
padding = 'same' if pad == 1 and stride == 1 else 'valid'
# Setting weights.
# Darknet serializes convolutional weights as:
# [bias/beta, [gamma, mean, variance], conv_weights]
prev_layer_shape = K.int_shape(prev_layer)
weights_shape = (size, size, prev_layer_shape[-1], filters)
darknet_w_shape = (filters, weights_shape[2], size, size)
weights_size = np.product(weights_shape)
print('conv2d', 'bn'
if batch_normalize else ' ', activation, weights_shape)
conv_bias = np.ndarray(
shape=(filters,),
dtype='float32',
buffer=weights_file.read(filters * 4))
count += filters
if batch_normalize:
bn_weights = np.ndarray(
shape=(3, filters),
dtype='float32',
buffer=weights_file.read(filters * 12))
count += 3 * filters
bn_weight_list = [
bn_weights[0], # scale gamma
conv_bias, # shift beta
bn_weights[1], # running mean
bn_weights[2] # running var
]
conv_weights = np.ndarray(
shape=darknet_w_shape,
dtype='float32',
buffer=weights_file.read(weights_size * 4))
count += weights_size
# DarkNet conv_weights are serialized Caffe-style:
# (out_dim, in_dim, height, width)
# We would like to set these to Tensorflow order:
# (height, width, in_dim, out_dim)
conv_weights = np.transpose(conv_weights, [2, 3, 1, 0])
conv_weights = [conv_weights] if batch_normalize else [
conv_weights, conv_bias
]
# Handle activation.
act_fn = None
if activation == 'leaky':
pass # Add advanced activation later.
elif activation != 'linear':
raise ValueError(
'Unknown activation function `{}` in section {}'.format(
activation, section))
# Create Conv2D layer
if stride > 1:
# Darknet uses left and top padding instead of 'same' mode
prev_layer = ZeroPadding2D(((1, 0), (1, 0)))(prev_layer)
conv_layer = (Conv2D(
filters, (size, size),
strides=(stride, stride),
kernel_regularizer=l2(weight_decay),
use_bias=not batch_normalize,
weights=conv_weights,
activation=act_fn,
padding=padding))(prev_layer)
if batch_normalize:
conv_layer = (BatchNormalization(
weights=bn_weight_list))(conv_layer)
prev_layer = conv_layer
if activation == 'linear':
all_layers.append(prev_layer)
elif activation == 'leaky':
act_layer = LeakyReLU(alpha=0.1)(prev_layer)
prev_layer = act_layer
all_layers.append(act_layer)
elif section.startswith('route'):
ids = [int(i) for i in cfg_parser[section]['layers'].split(',')]
layers = [all_layers[i] for i in ids]
if len(layers) > 1:
print('Concatenating route layers:', layers)
concatenate_layer = Concatenate()(layers)
all_layers.append(concatenate_layer)
prev_layer = concatenate_layer
else:
skip_layer = layers[0] # only one layer to route
all_layers.append(skip_layer)
prev_layer = skip_layer
elif section.startswith('maxpool'):
size = int(cfg_parser[section]['size'])
stride = int(cfg_parser[section]['stride'])
all_layers.append(
MaxPooling2D(
pool_size=(size, size),
strides=(stride, stride),
padding='same')(prev_layer))
prev_layer = all_layers[-1]
elif section.startswith('shortcut'):
index = int(cfg_parser[section]['from'])
activation = cfg_parser[section]['activation']
assert activation == 'linear', 'Only linear activation supported.'
all_layers.append(Add()([all_layers[index], prev_layer]))
prev_layer = all_layers[-1]
elif section.startswith('upsample'):
stride = int(cfg_parser[section]['stride'])
assert stride == 2, 'Only stride=2 supported.'
all_layers.append(UpSampling2D(stride)(prev_layer))
prev_layer = all_layers[-1]
elif section.startswith('yolo'):
out_index.append(len(all_layers) - 1)
all_layers.append(None)
prev_layer = all_layers[-1]
elif section.startswith('net'):
pass
else:
raise ValueError(
'Unsupported section header type: {}'.format(section))
# Create and save model.
if len(out_index) == 0: out_index.append(len(all_layers) - 1)
model = Model(inputs=input_layer, outputs=[all_layers[i] for i in out_index])
print(model.summary())
model.save('{}'.format(output_path))
print('Saved Keras model to {}'.format(output_path))
# Check to see if all weights have been read.
remaining_weights = len(weights_file.read()) / 4
weights_file.close()
print('Read {} of {} from Darknet weights.'.format(count, count +
remaining_weights))
if remaining_weights > 0:
print('Warning: {} unused weights'.format(remaining_weights))
if __name__ == '__main__':
main()
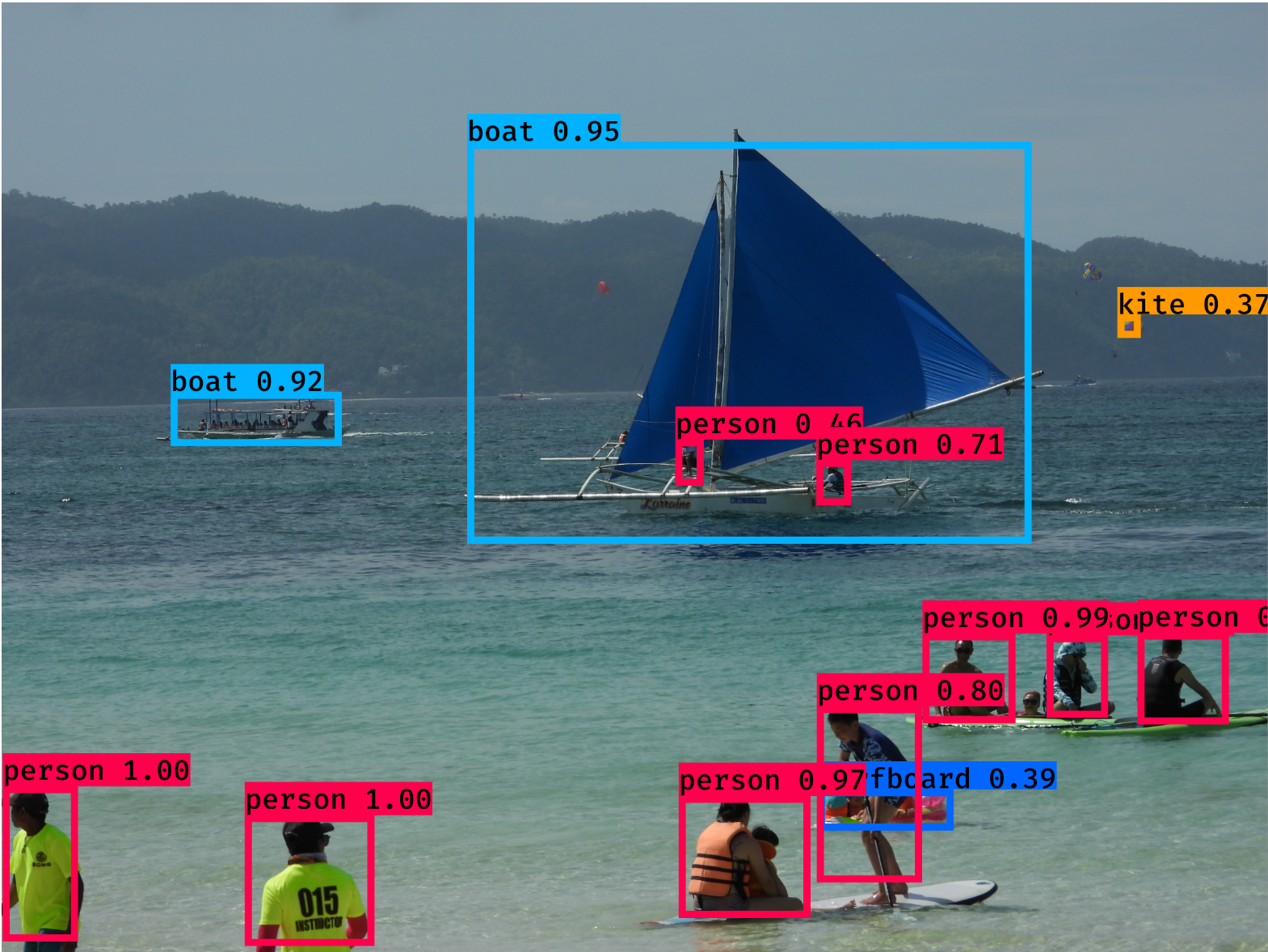
偵測圖片
模型(.cfg)有了,訓練後的資料(權重)也有了,接下來就可以開始偵測新圖片了
from yolo import YOLO
from PIL import Image
if __name__ == '__main__':
yolo=YOLO()
image=Image.open('demo.jpg')
yolo.detect_image(image).show()
訓練模型
若想訓練自已的模型,偵測自已想要的種類,就必需繼續下面的操作。首先,檢視一下,專案之下的 model_data 目錄是否有如下檔案
├─ 專案 │ ├─ model_data
│ │ ├─ xml
│ │ │ ├─ a.xml檔案
│ │ │ ├─ b.xml檔案
│ │ │ ├─ .....xml檔案 │ │ ├─ my_class.txt
│ │ ├─ yolo_anchors.txt
│ │ ├─ yola_weights.h5 │ ├─ settings.py
│ ├─ 訓練模型.py
│ ├─ 偵測.py
xml
xml 目錄下,包含了所有由labelImg所標示的xml檔。
my_class.txt
包含要訓練的種類,每個種類都需換行,檔案內容如下
cat
dog
bird
yolo_anchors.txt
是訓練時要使用的filter大小,共有9組,內容如下,請不要任意變更
10,13, 16,30, 33,23, 30,61, 62,45, 59,119, 116,90, 156,198, 373,326
yolo_weights.h5
此檔案就是上述所說明,由官網下載的 yolo_weights,再經由 h5權重轉換.py 產生的 .h5檔。此檔作為接續訓練的 “預前預訓練檔”,一定要留著。
訓練模型.py
本程式已簡化官網的步驟,不需要轉換voc啦,分割train/test啦,也不需要將原始圖檔copy到專案。
本程式很簡單,只要把所有由 labelImg 產生的xml檔,全部copy到model_data/xml之下即可,其它的事都不用作。
訓練完成後,會自動在model_data目錄下產生trained_model_final.h5這個權重模型,此檔就可以用來偵測自已的圖片了。
那麼原始圖檔為什麼不用copy到專案呢? 因為xml裏就記載原始圖檔的目錄位置,訓練代碼自動會去抓,所以不要把原始圖檔砍掉就好.
代碼中,請依自已的顯卡記憶体調整 batch_size。記憶体愈小,batch_size就要調愈小。本人的nVidia RTX3080Ti 顯卡內存為12G, batch_size = 12 為最佳數值。
import numpy as np
import tensorflow.keras.backend as K
from tensorflow.keras.callbacks import TensorBoard, ModelCheckpoint, ReduceLROnPlateau, EarlyStopping
from tensorflow.keras.layers import Input, Lambda
from tensorflow.keras.models import Model
from tensorflow.keras.optimizers import Adam
from yolo3.model import preprocess_true_boxes, yolo_body, tiny_yolo_body, yolo_loss
from yolo3.utils import get_random_data
import os
import xml.etree.ElementTree as ET
import shutil
classes = ["cat","dog", "bird"] #定義自訂義類別名稱
batch_size = 12
def convert_annotation(file):
in_file = open('model_data/xml/%s.xml' %file, encoding='utf-8') #指定標註檔路徑
tree=ET.parse(in_file)
root = tree.getroot()
line=root.find('path').text
for obj in root.iter('object'):
difficult = obj.find('difficult').text
cls = obj.find('name').text
if cls not in classes or int(difficult)==1:
continue
cls_id = classes.index(cls)
xmlbox = obj.find('bndbox')
b = (int(xmlbox.find('xmin').text), int(xmlbox.find('ymin').text), int(xmlbox.find('xmax').text), int(xmlbox.find('ymax').text))
line+=" " + ",".join([str(a) for a in b]) + ',' + str(cls_id)
return line
def get_classes(classes_path):
'''loads the classes'''
with open(classes_path) as f:
class_names = f.readlines()
class_names = [c.strip() for c in class_names]
return class_names
def get_anchors(anchors_path):
'''loads the anchors from a file'''
with open(anchors_path) as f:
anchors = f.readline()
anchors = [float(x) for x in anchors.split(',')]
return np.array(anchors).reshape(-1, 2)
def create_model(input_shape, anchors, num_classes, load_pretrained=True, freeze_body=2,
weights_path='model_data/yolo_weights.h5'):
'''create the training model'''
K.clear_session() # get a new session
image_input = Input(shape=(None, None, 3))
h, w = input_shape
num_anchors = len(anchors)
y_true = [Input(shape=(h // {0: 32, 1: 16, 2: 8}[l], w // {0: 32, 1: 16, 2: 8}[l], \
num_anchors // 3, num_classes + 5)) for l in range(3)]
model_body = yolo_body(image_input, num_anchors // 3, num_classes)
print('Create YOLOv3 model with {} anchors and {} classes.'.format(num_anchors, num_classes))
if load_pretrained:
model_body.load_weights(weights_path, by_name=True, skip_mismatch=True)
print('Load weights {}.'.format(weights_path))
if freeze_body in [1, 2]:
# Freeze darknet53 body or freeze all but 3 output layers.
num = (185, len(model_body.layers) - 3)[freeze_body - 1]
for i in range(num): model_body.layers[i].trainable = False
print('Freeze the first {} layers of total {} layers.'.format(num, len(model_body.layers)))
model_loss = Lambda(yolo_loss, output_shape=(1,), name='yolo_loss',
arguments={'anchors': anchors, 'num_classes': num_classes, 'ignore_thresh': 0.5})(
[*model_body.output, *y_true])
model = Model([model_body.input, *y_true], model_loss)
return model
def create_tiny_model(input_shape, anchors, num_classes, load_pretrained=True, freeze_body=2,
weights_path='model_data/tiny_yolo_weights.h5'):
'''create the training model, for Tiny YOLOv3'''
K.clear_session() # get a new session
image_input = Input(shape=(None, None, 3))
h, w = input_shape
num_anchors = len(anchors)
y_true = [Input(shape=(h // {0: 32, 1: 16}[l], w // {0: 32, 1: 16}[l], \
num_anchors // 2, num_classes + 5)) for l in range(2)]
model_body = tiny_yolo_body(image_input, num_anchors // 2, num_classes)
print('Create Tiny YOLOv3 model with {} anchors and {} classes.'.format(num_anchors, num_classes))
if load_pretrained:
model_body.load_weights(weights_path, by_name=True, skip_mismatch=True)
print('Load weights {}.'.format(weights_path))
if freeze_body in [1, 2]:
# Freeze the darknet body or freeze all but 2 output layers.
num = (20, len(model_body.layers) - 2)[freeze_body - 1]
for i in range(num): model_body.layers[i].trainable = False
print('Freeze the first {} layers of total {} layers.'.format(num, len(model_body.layers)))
model_loss = Lambda(yolo_loss, output_shape=(1,), name='yolo_loss',
arguments={'anchors': anchors, 'num_classes': num_classes, 'ignore_thresh': 0.7})(
[*model_body.output, *y_true])
model = Model([model_body.input, *y_true], model_loss)
return model
def data_generator(annotation_lines, batch_size, input_shape, anchors, num_classes):
'''data generator for fit_generator'''
n = len(annotation_lines)
i = 0
while True:
image_data = []
box_data = []
for b in range(batch_size):
if i == 0:
np.random.shuffle(annotation_lines)
image, box = get_random_data(annotation_lines[i], input_shape, random=True)
image_data.append(image)
box_data.append(box)
i = (i + 1) % n
image_data = np.array(image_data)
box_data = np.array(box_data)
y_true = preprocess_true_boxes(box_data, input_shape, anchors, num_classes)
yield [image_data, *y_true], np.zeros(batch_size)
def data_generator_wrapper(annotation_lines, batch_size, input_shape, anchors, num_classes):
n = len(annotation_lines)
if n == 0 or batch_size <= 0: return None
return data_generator(annotation_lines, batch_size, input_shape, anchors, num_classes)
if __name__ == '__main__':
shutil.rmtree('logs')
#annotation_path = 'train.txt' # 待訓練清單(YOLO格式)
log_dir = 'logs/000/' # 訓練過程及結果暫存路徑
classes_path = 'model_data/road_classes.txt' # 自定義標籤檔路徑及名稱
anchors_path = 'model_data/yolo_anchors.txt' # 錨點定義檔路徑及名稱
class_names = get_classes(classes_path)
num_classes = len(class_names)
anchors = get_anchors(anchors_path)
input_shape = (416, 416) # multiple of 32, hw 預設輸入影像尺寸須為32的倍數(寬,高)
is_tiny_version = len(anchors) == 6 # default setting
if is_tiny_version:
model = create_tiny_model(input_shape, anchors, num_classes,
freeze_body=2, weights_path='model_data/tiny_yolo_weights.h5')
else:
model = create_model(input_shape, anchors, num_classes,
freeze_body=2, weights_path='model_data/yolo_weights.h5') # 指定起始訓練權重檔路徑及名稱
logging = TensorBoard(log_dir=log_dir)
checkpoint = ModelCheckpoint(log_dir + 'ep{epoch:03d}-loss{loss:.3f}-val_loss{val_loss:.3f}.h5',
monitor='val_loss', save_weights_only=True, save_best_only=True,
period=3) # 訓練過程權重檔名稱由第幾輪加上損失率為名稱
reduce_lr = ReduceLROnPlateau(monitor='val_loss', factor=0.1, patience=3, verbose=1)
early_stopping = EarlyStopping(monitor='val_loss', min_delta=0, patience=10, verbose=1)
val_split = 0.1
files = os.listdir('model_data/xml')
lines = []
for file in files:
lines.append(convert_annotation(file.split('.')[0]))
np.random.seed(10101)
np.random.shuffle(lines)
np.random.seed(None)
num_val = int(len(lines) * val_split)
num_train = len(lines) - num_val
# Train with frozen layers first, to get a stable loss.
# Adjust num epochs to your dataset. This step is enough to obtain a not bad model.
if True:
model.compile(optimizer=Adam(lr=1e-3), loss={
# use custom yolo_loss Lambda layer.
'yolo_loss': lambda y_true, y_pred: y_pred})
print('Train on {} samples, val on {} samples, with batch size {}.'.format(num_train, num_val, batch_size))
model.fit_generator(data_generator_wrapper(lines[:num_train], batch_size, input_shape, anchors, num_classes),
steps_per_epoch=max(1, num_train // batch_size),
validation_data=data_generator_wrapper(lines[num_train:], batch_size, input_shape, anchors,
num_classes),
validation_steps=max(1, num_val // batch_size),
epochs=50, # 訓練遍歷次數
initial_epoch=0, # 初始訓練遍歷次數
callbacks=[logging, checkpoint])
model.save_weights(log_dir + 'trained_weights_stage_1.h5') # 儲存臨時權重檔案名稱
# 解凍並繼續訓練以進行微調
# 如果效果不好則訓練更長時間
if True:
for i in range(len(model.layers)):
model.layers[i].trainable = True
model.compile(optimizer=Adam(lr=1e-4),
loss={'yolo_loss': lambda y_true, y_pred: y_pred}) # recompile to apply the change
print('Unfreeze all of the layers.')
print('Train on {} samples, val on {} samples, with batch size {}.'.format(num_train, num_val, batch_size))
model.fit_generator(data_generator_wrapper(lines[:num_train], batch_size, input_shape, anchors, num_classes),
steps_per_epoch=max(1, num_train // batch_size),
validation_data=data_generator_wrapper(lines[num_train:], batch_size, input_shape, anchors,
num_classes),
validation_steps=max(1, num_val // batch_size),
epochs=100, # 訓練遍歷次數
initial_epoch=50, # 初始訓練遍歷次數
callbacks=[logging, checkpoint, reduce_lr, early_stopping])
model.save_weights(log_dir + 'trained_weights_final.h5') # 儲存最終權重檔
model.save(log_dir + 'trained_model_final.h5') #儲存完整模型及權重檔
os.rename('logs/000/trained_model_final.h5', 'model_data/trained_model_final.h5')
# Further training if needed.
todo
參考 :
https://blog.csdn.net/aaronjny/article/details/103658254