
圖片
 |
 |
運作
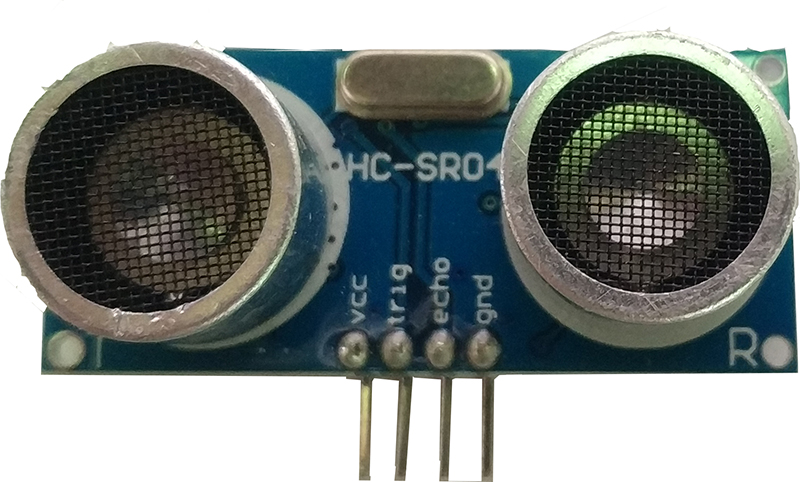
超音波測距模組用來測量前方障礙物的距離. HC-SR0這型號有四支針腳,
VCC : +5V
Trig : 接到GPIO04, 設為Output
Echo : 接到GPIO05, 設為Input
Gnd : 接地
Trig 先啟動3V, 加入電壓約10ms後再關掉. 過了一段時間準備後, Echo 針腳狀況會變成High, 此時就可以開始計時(t1), 因為此時開始發射8個40kHz的方型超音波.
當接收到回波後, 此針腳就狀態就會變成Low, 此時就可以結束計時(t2)
t2-t1就是聲波來回的時間, 所以單程時間為 (t2-t1)/2
音速
音速依當時溫及氣壓有所不同. 但差異不多, 所以可以依 340m/s的速度來計算. 也就是每秒會跑340公尺=34000cm.
所以1cm需要1/34000秒 = 2.9412 * 10-5秒 = 2.9412 * 10-2 ms = 29.412 微秒
另一個思考方式
1 sec : 34000cm (1秒 34000公分)
1 ms : 34cm (1毫秒 34公分)
1微秒 : 0.034cm (1微秒 0.034公分)
1奈秒 : 0.000034cm (1奈秒 0.000034公分)
Java Time Method
Java有System.currentTimeMillis() 可以取得 1970/01/01 0:0:0am到現在所經過的毫秒數(西洋稱為Time Stamp). 但音速是精準到微秒, 所以需使用另一個方法 System.nanoTime() 取得某段時間到現在的奈秒數. 此方法跟時間是沒什麼關係, 因為某段時間的起始值依不同vm而不同. 所以只能計算二段之間的奈秒差
請注意, Java官方說法, 此方法是計算二段時間的nano second, 也就是奈秒. 但台灣許多人翻譯成毫微秒.
ps : 毫微秒這個名詞, 可能是台灣人自創的, 因為這名詞在大陸也查不到.
距離計算
所以上述的(t2-t1)/2, 為單程的奈秒數, (t2-t1)/2/1000為單程的微秒數,
(t2-t1)/2/1000/29.412 即為單程距離的cm值.
當然也可以使用 (t2-t1)/2/1000*0.034 cm
精準度
本模組的精準度真的是會嚇死人, 規格如下
輸出電位( 1/ 0):5V/ 0V
精度:3mm
距離範圍:2 ~ 450cm
有效的角度:<15o
觸發輸入信號:10uS TTL pulse
接線方式
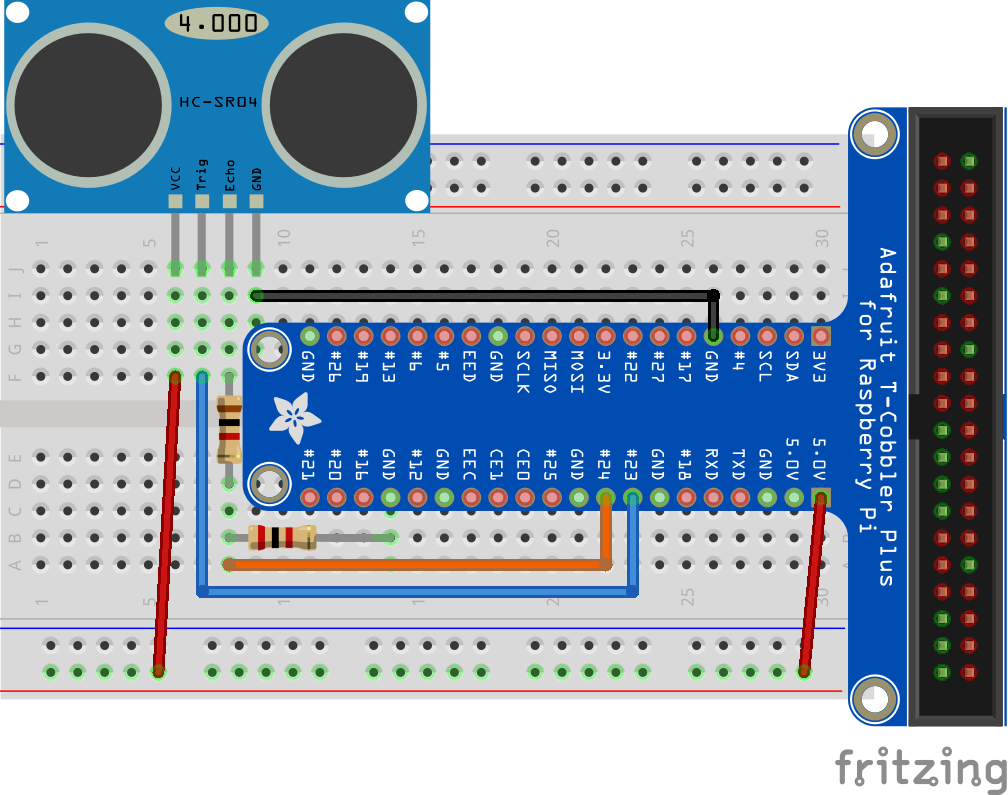
分流
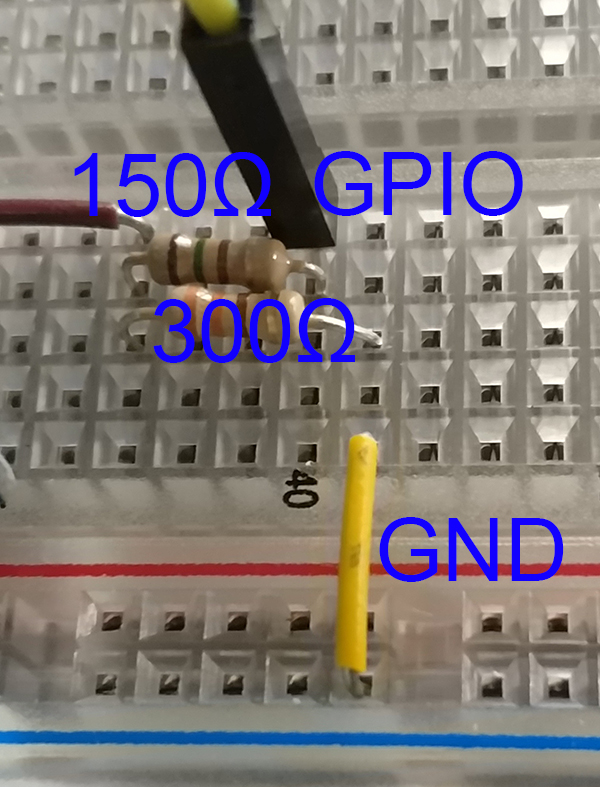
請注意, Echo 輸出也是5V. 是接進GPIO裏的. 所以需要使用並聯的方式進行分流. 接個150Ω 再接進GPIO, 然後並聯300Ω接進GND. 這樣板子比較不容易燒毀.
分流的電阻值也不一定要按上面值, 只要是1:2即可
程式範例
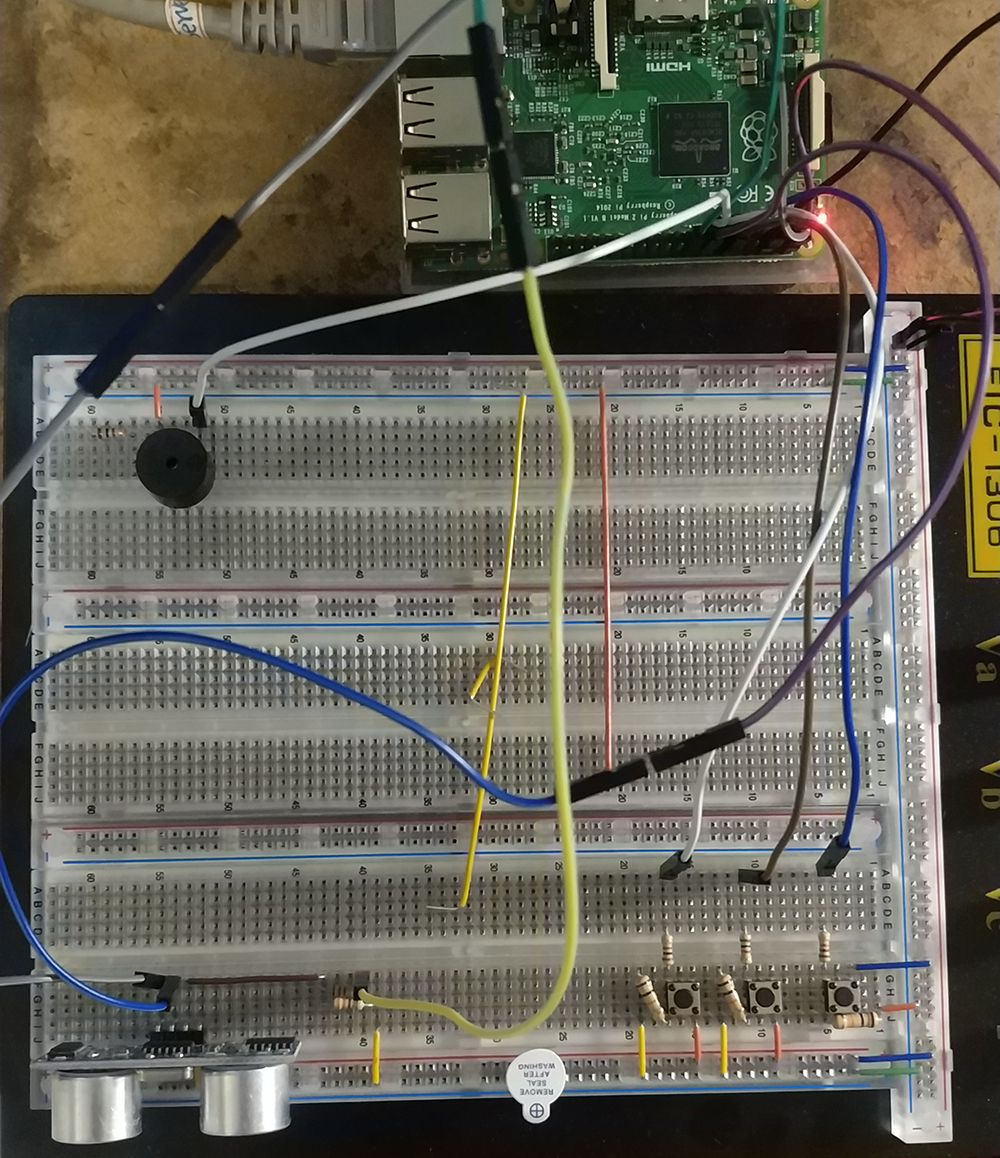
底下的程式碼, 示範接了一個蜂鳴器及超音波測距器, 可應用於倒車雷達上.
當距離為5公分內, 蜂鳴器會一直叫, 然後依10, 20, 50, 100, 150公分, 而有不同的鳴叫時間間隔
按下PowerButton後, 整個程式就會停止執行
package ultrasonic;
import com.pi4j.io.gpio.GpioController;
import com.pi4j.io.gpio.GpioFactory;
import com.pi4j.io.gpio.GpioPinDigitalInput;
import com.pi4j.io.gpio.GpioPinDigitalOutput;
import com.pi4j.io.gpio.PinPullResistance;
import com.pi4j.io.gpio.PinState;
import com.pi4j.io.gpio.RaspiPin;
import com.pi4j.io.gpio.event.GpioPinDigitalStateChangeEvent;
import com.pi4j.io.gpio.event.GpioPinListenerDigital;
import java.util.logging.Level;
import java.util.logging.Logger;
public class UltraSonicTest {
public static double distance=0;
public static boolean closeFlag=false;
public static void main(String[] args){
GpioController gpioController =GpioFactory.getInstance();
GpioPinDigitalInput buttonPower=gpioController.provisionDigitalInputPin(RaspiPin.GPIO_00, PinPullResistance.PULL_DOWN);
GpioPinDigitalOutput pinSpeaker=gpioController.provisionDigitalOutputPin(RaspiPin.GPIO_03, "Speaker", PinState.LOW);
UltraSonic ultraSonic=new UltraSonic(gpioController);
ultraSonic.start();
buttonPower.addListener(new GpioPinListenerDigital(){
@Override
public void handleGpioPinDigitalStateChangeEvent(GpioPinDigitalStateChangeEvent event) {
PinState state=event.getState();
if(state.isHigh()){
closeFlag=true;
}
}
});
Thread speaker=new Thread(()->{
while(!closeFlag){
int duration=0;
if(UltraSonicTest.distance<=5){
pinSpeaker.setState(PinState.HIGH);
}
else{
if(UltraSonicTest.distance<=10)duration=100;
else if(UltraSonicTest.distance<=20)duration=150;
else if(UltraSonicTest.distance<=50)duration=200;
else if(UltraSonicTest.distance<=100)duration=300;
else if(UltraSonicTest.distance<=150)duration=600;
else duration=1000;
if(duration>=1000)
pinSpeaker.setState(PinState.LOW);
else
pinSpeaker.blink(duration, 500, PinState.HIGH);
try {
Thread.sleep(600);
}
catch (InterruptedException ex) {}
}
}
});
speaker.start();
while(!closeFlag){
try {
Thread.sleep(500);
} catch (InterruptedException ex) {}
}
buttonPower.removeAllListeners();
ultraSonic.close();
try {Thread.sleep(2000);} catch (InterruptedException ex) {}
buttonPower.setShutdownOptions(true, PinState.LOW);
pinSpeaker.setShutdownOptions(true, PinState.LOW);
gpioController.shutdown();
System.out.println("App Close");
}
}
class UltraSonic extends Thread{
private GpioPinDigitalOutput sensorTriggerPin ;
private GpioPinDigitalInput sensorEchoPin ;
boolean runFlag=true;
public UltraSonic (GpioController gpio){
//Trigger pin為Output
sensorTriggerPin = gpio.provisionDigitalOutputPin(RaspiPin.GPIO_04);
//Echo pin為Input
sensorEchoPin = gpio.provisionDigitalInputPin(RaspiPin.GPIO_05,PinPullResistance.PULL_DOWN);
}
public void run(){
while(runFlag){
try {
sensorTriggerPin.high(); //Trig變更為High
Thread.sleep(10);// 延遲10ms
sensorTriggerPin.low(); //Trig變更為Low
//等待ECHO pin變更為High
while(sensorEchoPin.isLow()){}
long startTime= System.nanoTime();//開始計時
while(sensorEchoPin.isHigh()){}//等待Echo變更為Low
long endTime= System.nanoTime();//結束計時
UltraSonicTest.distance=(endTime-startTime)/1000.0/2 * 0.034;
System.out.println(String.format("Distance : %.3f cm", UltraSonicTest.distance));
Thread.sleep(300);
} catch (InterruptedException e) {}
}
}
public void close(){
runFlag=false;
this.interrupt();
}
}