向量Vector
向量是方向的量化,或方向數位化的簡稱。描述方向的方式,可以用右上30度,左下45度。
這種描述的方式,對人類而言很直覺,但在數學或電腦上,無法計算。所以就量化成 x, y二軸的數字(3, 4)
todo
下圖紅色線 z 是由 x 及 y 二條綠色線組成。所以我們定義 $(\vec{z}=\vec{x}+\vec{y})$
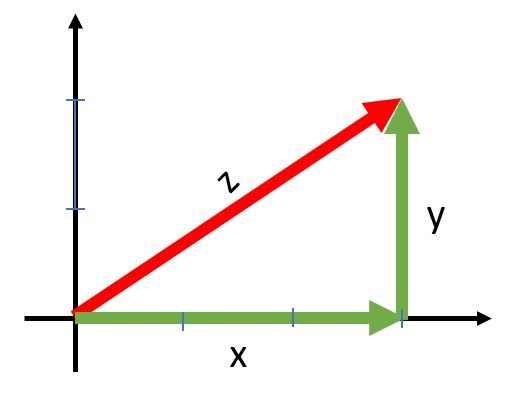
對於向量的寫法,總是有點難懂。把它想像成是一艘太空船,以水平3km/hr的速度往右,垂直2km/hr的速度往上。所以這艘太空船就會以$(\sqrt{3*3+2*2}=\sqrt{13})$的速度往$(\vec{z})$的方向前進。
基底向量
我們定義$(\vec{i}=\begin{bmatrix}1\\0\end{bmatrix} , \vec{j}=\begin{bmatrix}0\\1\end{bmatrix})$
上述的$(\vec{x})$及$(\vec{y})$分別為
$(\vec{x}=3 * \begin{bmatrix}1\\0\end{bmatrix})$
$(\vec{y}=2 * \begin{bmatrix}0\\1\end{bmatrix})$
所以$(\vec{z}=\vec{x}+\vec{y}=3*\vec{i}+2*\vec{j})$
$(\vec{i})$及$(\vec{j})$,我們稱為基底向量。以1為主的基底向量,稱為標準基底向量。此時有二個變數 3, 2,亦稱為二個特徵。
變更基底向量
如果上述的基底向量變更為
$(\vec{v}=\begin{bmatrix}1.5\\1\end{bmatrix})$,此時$(\vec{z}=2*\vec{v})$
若再變成
$(\vec{v}=\begin{bmatrix}3\\2\end{bmatrix})$,此時$(\vec{z}=1*\vec{v})$
也就是整個圖轉成如下的樣子,此時只需一個變數 “2” 或 “1” 即可描述整個向量。此時特徵就會變成只有一個
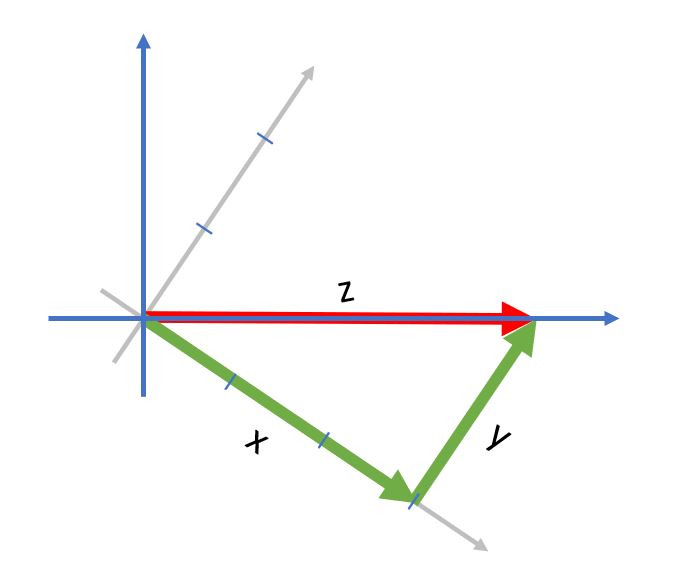
說的更直白一點,$(\vec{v})$就是我們要巔覆傳統的度量衡單位,創造另一個新的單位。比如現今有一公尺,一公里。但我們就是要創造一個新的單位,比如~~一光秒(光一秒跑的距離)。那麼太陽離地球的距離就不再是1.5億(150,000,000)公里,而是500光秒,也就是8.3光分,如此簡化了很多個 “0”。
向量就是 2*1矩陣
上述不論是$(\vec{v}=\begin{bmatrix}3\\2\end{bmatrix})$ 或是 $(\vec{i}= \begin{bmatrix}1\\0\end{bmatrix})$
可以很明顯的看出,原來向量就是一個 2*1的矩陣$(\begin{bmatrix}
x\\y\end{bmatrix})$,也就是$(\begin{bmatrix}x,y \end{bmatrix}^{T})$
張量(Tensor)
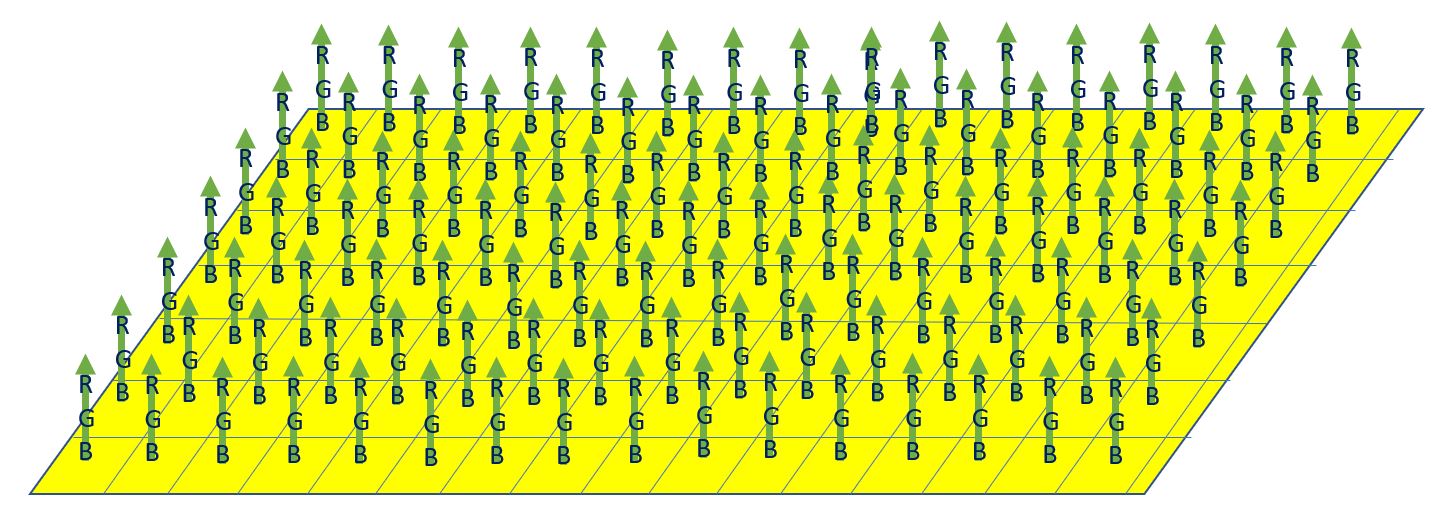
以圖片像素為例,每個像素皆有(r, g, b)三個值。我們稱每個點的(r, g, b) 為一個向量。而如下黃色區域每一個格點都有一個向量。這些眾多向量的集合,稱為張量。也就是說,張量是由多個向量組成。
說的更貼切一點,就是在二維平面上,每個點又有多個特徵的意思。拓展開來,m個維度上,每個點又有n個特徵