
m/s 轉 km/hr
每秒 m 公尺,轉成每小時 x 公里的公式為
x =m *3600/1000 = m *3.6
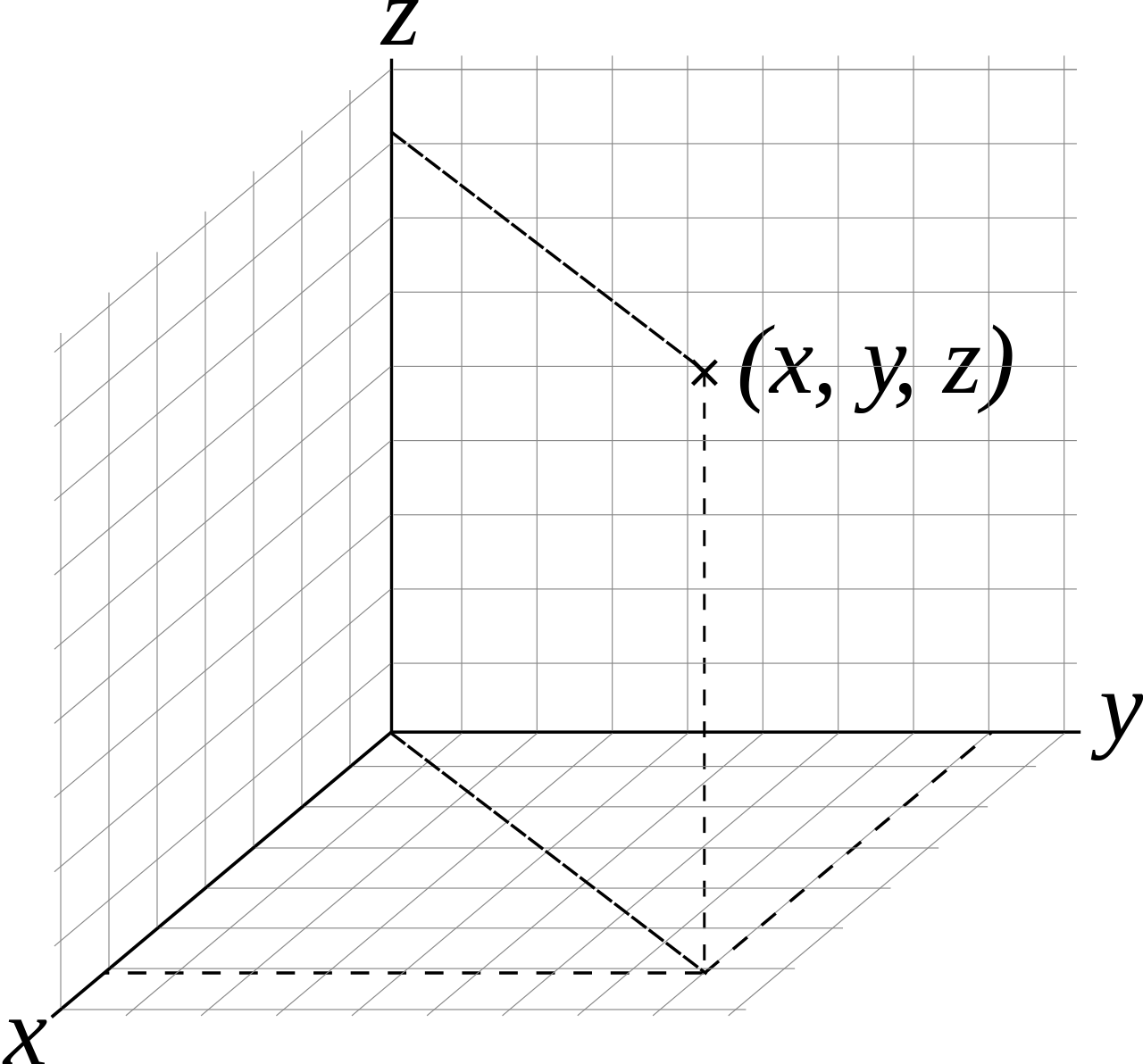
卡迪兒座標系(Cartesian coordinate system)
我們常稱的xy座標,或是xyz立体空間座標,就是卡迪兒座標系,這傢伙是法國人。由二個或三個正交線所組成的。如下圖為3D立体座標系。
三角函數
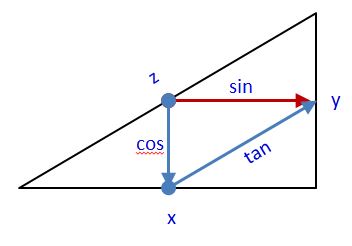
$(sin\theta =\frac{y}{z})$
$(cos\theta =\frac{x}{z})$
$(tan\theta =\frac{y}{x})$
三角面積 : $(\frac{x*y}{2})$
反三角函數 : $(sin^{-1}(\frac{y}{z}))$=角度
弧度(弳度) : $(1^{o}=\frac{\pi}{180})$
圓公式
圓周 : $(2\pi r)$
圓面積 : $(\pi r^{2})$
正弦波 : $(f(x)=A*sin(k\pi t))$ : A為振幅,k 為波峰數,t 為時間
圓函數
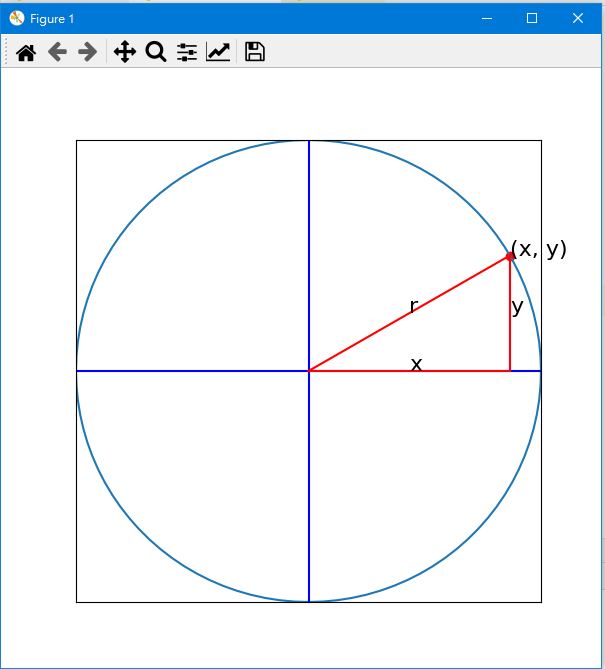
上述的圖形,由下面的Python代碼所繪製而成的。(x, y)座標點中,x, y分別為
$(x=r*cos(\frac{\pi}{180}*\theta))$
$(y=r*sin(\frac{\pi}{180}*\theta))$
當$(\theta)$ 由 0變換到360度時,即形成一個圓
import numpy as np
import pylab as plt
r=10
n=100
x=[]
y=[]
for i in range(n+1):
angle=360/n*i
x.append(r*np.cos(np.pi/180*angle))
y.append(r * np.sin(np.pi / 180 * angle))
plt.figure(figsize=(6,6))
plt.xticks([])
plt.yticks([])
plt.plot(x, y)
plt.xlim(-r, r)
plt.ylim(-r, r)
plt.plot([-r, r],[0, 0], color='blue')#畫X軸
plt.plot([0, 0],[-r, r], color='blue')#畫y軸
#底下畫個三角型
x1=r*np.cos(np.pi/180*30)
y1=r*np.sin(np.pi/180*30)
plt.scatter([x1],[y1], color='red')#畫點
plt.text(x1, y1,s='(x, y)', fontsize=16)
plt.text(x1/2,0 ,s='x', fontsize=16)
plt.text(x1, y1/2 ,s='y', fontsize=16)
plt.text(x1/2, y1/2 ,s='r', fontsize=16)
plt.plot([x1, x1],[0, y1], color='red')
plt.plot([0, x1],[0, y1], color='red')
plt.plot([0, x1],[0, 0], color='red')
plt.show()
一元二次方程式求解
$(ax^{2}+bx+c=0)$
二邊除a : $(x^{2}+\frac{bx}{a}+\frac{c}{a}=0)$
$(\therefore x^{2}+\frac{bx}{a}=-\frac{c}{a})$
二邊加上$((\frac{b}{2a})^{2})$ => $(x^{2}+\frac{bx}{a}+(\frac{b}{2a})^{2}=-\frac{c}{a}+(\frac{b}{2a})^{2})$
$(\therefore (x+\frac{b}{2a})^{2}=\frac{b^{2}-4ac}{4a^{2}})$
$(x=\frac{-b\pm \sqrt{b^{2}-4ac}}{2a})$
總和公式
$(\sum_{i=1}^{i=n}x_{i}=x_{1}+x_{2}+…+x_{n})$
平均數(Mean)
$(\mu =\frac{1}{n}\sum_{i=1}^{i=n}x_{i}=\frac{x_{1}+x_{2}+…+x_{n}}{n})$
$(\sum)$ 唸成 Sigma
sum=0
import numpy as np
rng=np.random.RandomState(0) #偽亂數
d=rng.randint(1,100,10)
print(d)
sum=0
for i in d:
sum+=i
print('用迴圈計算總合 : ', sum, '<==速度很慢')
print('d.sum() : ', d.sum(), '<==調用C語言執行,速度超極快')
u=d.mean()
print('sum/10 = ', sum/10)
print('d.mean() ', d.mean(), '<==調用C語言執行,速度超極快')
結果 :
[45 48 65 68 68 10 84 22 37 88]
用迴圈計算總合 : 535 <==速度很慢
d.sum() : 535 <==調用C語言執行,速度超極快
sum/10 = 53.5
d.mean() 53.5 <==調用C語言執行,速度超極快
用迴圈計算總和,是傳統語言必會的技術。但在Python使用迴圈則效能太差。需使用d.sum()調用C語言來執行,速度才會快.
變異數(Variance)
何謂變異數?? 假設有二個國家,每個國家有5個人
美國 : 五個人分別收入為 [10000,100000,5000,5000,5000]
台灣 : 五個人分別收入為[30000,30000,30000,30000,30000]
經計算 :
美國 : 變異數 : 1,410,000,000, 標準差 : 37,549.96
台灣 : 變異數 : 0,標準差 : 0
由上的數字,可以得知美國的貧富差異實在是大的不得了。因為就可以用這組數字來描述貧富差異的嚴重性。
那到底是要用變異數還是標準差來描述這種嚴重性呢? 都一樣啦,標準差是變異數的平方根,看起來數字比較小,比較漂亮,比較無感而以啦。
變異數的公式如下 :
$(\sigma ^{2} = \frac{1}{n}\sum_{i=1}^{i=n}(x_{i}-\mu )^{2}=\frac{(x_{1}-\mu )^{2}+(x_{2}-\mu )^{2}+…+(x_{n}-\mu )^{2}}{n})$
$(\sigma)$ 也唸成Sigma
import numpy as np
rng=np.random.RandomState(0) #偽亂數
d=rng.randint(1,100,10)
print(d)
u=d.mean()
o2=((d-u)**2).mean()
print('((d-d.mean())**2).mean() : ', ((d-u)**2).mean(), '<====變異數')
print('d.var() :', d.var(), '<====變異數')
print('標準差 : ', d.std(), '<===就是變異數的平方根')
結果 :
[45 48 65 68 68 10 84 22 37 88]
((d-d.mean())**2).mean() : 593.25 <====變異數
d.var() : 593.25 <====變異數
標準差 : 24.3567239176372 <===就是變異數的平方根
以平方差的姿態,加入群組之後,大量影響群組的結果,然後平圴群組的數字,造成差異。
標準差(Standard Deviation – SD)
就是變異數的平方根,如上所示
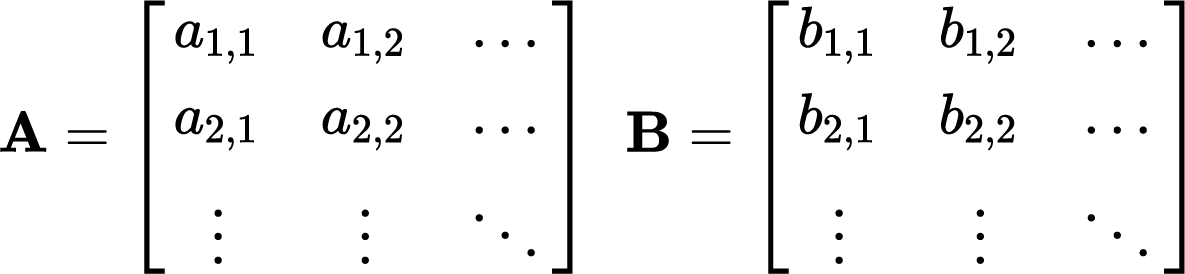
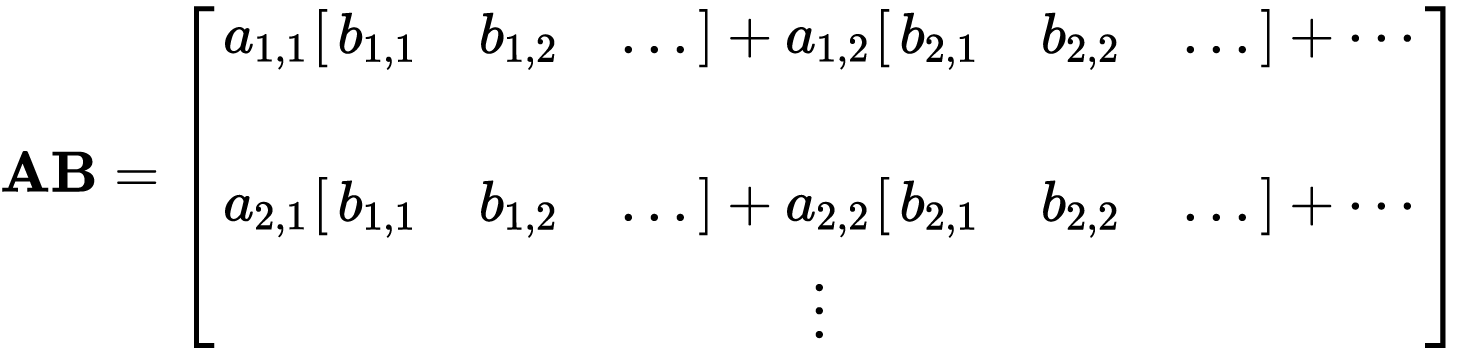
矩陣相乘
底下有一些數學矩陣計算式,再此先說明矩陣乘法
假設矩陣A為2*2,矩陣B為 2*3, 則A*B為2*3矩陣
import numpy as np
a=np.array([[1,2, 3],
[4, 5, 6]])
b=np.array([[1,2],
[3,4],
[5,6],
])
c=a @ b
print(c)
d=np.array([[1,2,3],
[4, 5, 6]])
e=np.array([[1,1,1],
[2, 2, 3]])
f=d*e
print(f)
結果
[[22 28]
[49 64]]
[[ 1 2 3]
[ 8 10 18]]
向量Vector
向量是方向的量化,或方向數位化的簡稱。描述方向的方式,可以用右上30度,左下45度。
這種描述的方式,對人類而言很直覺,但在數學或電腦上,無法計算。所以就量化成 x, y二軸的數字(3, 4)
todo
下圖紅色線 z 是由 x 及 y 二條綠色線組成。所以我們定義 $(\vec{z}=\vec{x}+\vec{y})$
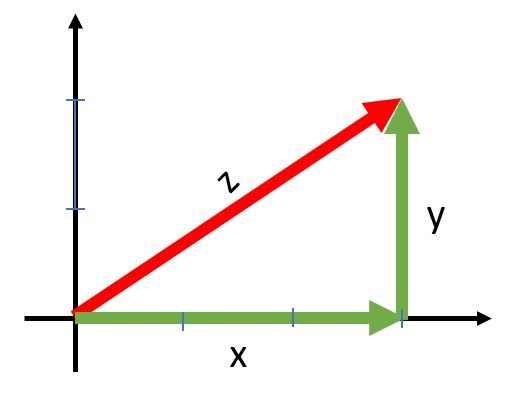
對於向量的寫法,總是有點難懂。把它想像成是一艘太空船,以水平3km/hr的速度往右,垂直2km/hr的速度往上。所以這艘太空船就會以$(\sqrt{3*3+2*2}=\sqrt{13})$的速度往$(\vec{z})$的方向前進。
基底向量
我們定義$(\vec{i}=\begin{bmatrix}1\\0\end{bmatrix} , \vec{j}=\begin{bmatrix}0\\1\end{bmatrix})$
上述的$(\vec{x})$及$(\vec{y})$分別為
$(\vec{x}=3 * \begin{bmatrix}1\\0\end{bmatrix})$
$(\vec{y}=2 * \begin{bmatrix}0\\1\end{bmatrix})$
所以$(\vec{z}=\vec{x}+\vec{y}=3*\vec{i}+2*\vec{j})$
$(\vec{i})$及$(\vec{j})$,我們稱為基底向量。以1為主的基底向量,稱為標準基底向量。此時有二個變數 3, 2,亦稱為二個特徵。
變更基底向量
如果上述的基底向量變更為
$(\vec{v}=\begin{bmatrix}1.5\\1\end{bmatrix})$,此時$(\vec{z}=2*\vec{v})$
若再變成
$(\vec{v}=\begin{bmatrix}3\\2\end{bmatrix})$,此時$(\vec{z}=1*\vec{v})$
也就是整個圖轉成如下的樣子,此時只需一個變數 “2” 或 “1” 即可描述整個向量。此時特徵就會變成只有一個
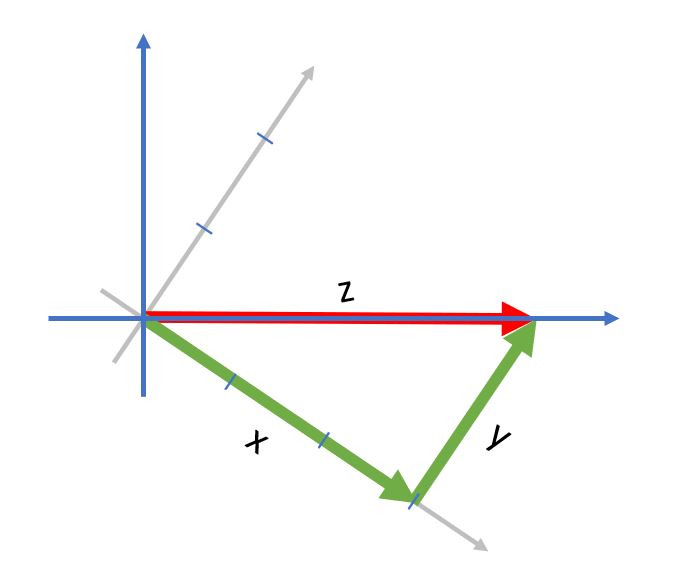
說的更直白一點,$(\vec{v})$就是我們要巔覆傳統的度量衡單位,創造另一個新的單位。比如現今有一公尺,一公里。但我們就是要創造一個新的單位,比如~~一光秒(光一秒跑的距離)。那麼太陽離地球的距離就不再是1.5億(150,000,000)公里,而是500光秒,也就是8.3光分,如此簡化了很多個 “0”。
向量就是 2*1矩陣
上述不論是$(\vec{v}=\begin{bmatrix}3\\2\end{bmatrix})$ 或是 $(\vec{i}= \begin{bmatrix}1\\0\end{bmatrix})$
可以很明顯的看出,原來向量就是一個 2*1的矩陣$(\begin{bmatrix}
x\\y\end{bmatrix})$,也就是$(\begin{bmatrix}x,y \end{bmatrix}^{T})$
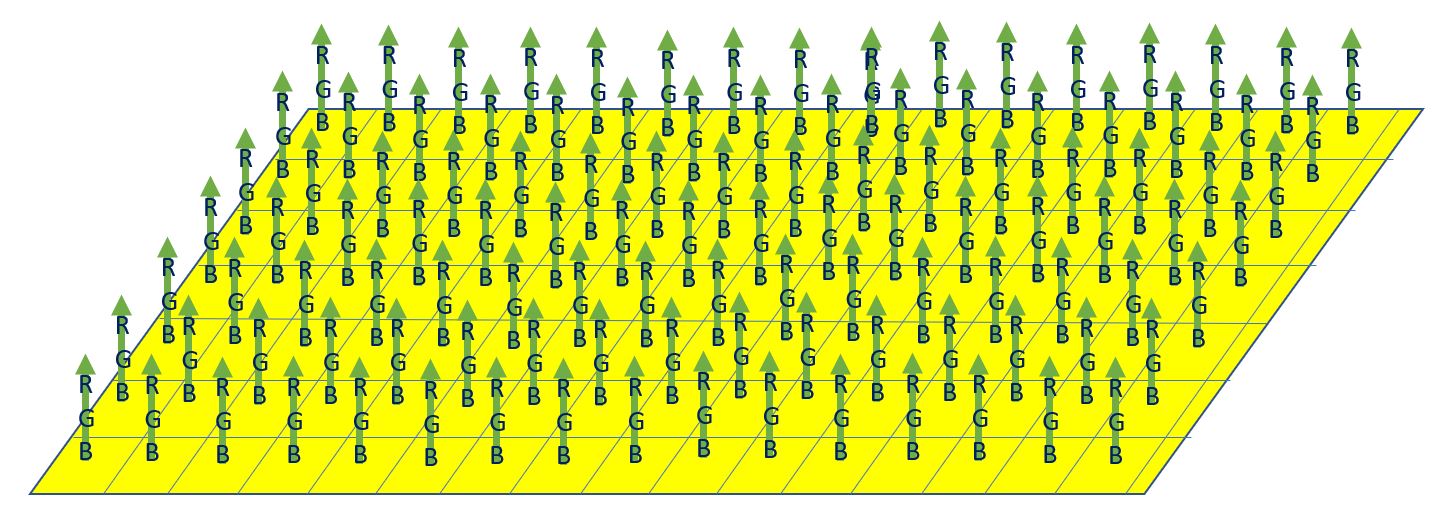
張量(Tensor)
以圖片像素為例,每個像素皆有(r, g, b)三個值。我們稱每個點的(r, g, b) 為一個向量。而如下黃色區域每一個格點都有一個向量。這些眾多向量的集合,稱為張量。也就是說,張量是由多個向量組成。
說的更貼切一點,就是在二維平面上,每個點又有多個特徵的意思。拓展開來,m個維度上,每個點又有n個特徵
本章節出現在數學篇是為了講解微分的方法。
但在AI TensorFlow章節又重新列出,是為了講解梯次下降的方法。
二都關係密切,所以必需完全了解。
一元二次方程式求解
$(ax^{2}+bx+c=0)$
二邊除a : $(x^{2}+\frac{bx}{a}+\frac{c}{a}=0)$
$(\therefore x^{2}+\frac{bx}{a}=-\frac{c}{a})$
二邊加上$((\frac{b}{2a})^{2})$ => $(x^{2}+\frac{bx}{a}+(\frac{b}{2a})^{2}=-\frac{c}{a}+(\frac{b}{2a})^{2})$
$(\therefore (x+\frac{b}{2a})^{2}=\frac{b^{2}-4ac}{4a^{2}})$
$(x=\frac{-b\pm \sqrt{b^{2}-4ac}}{2a})$
導數
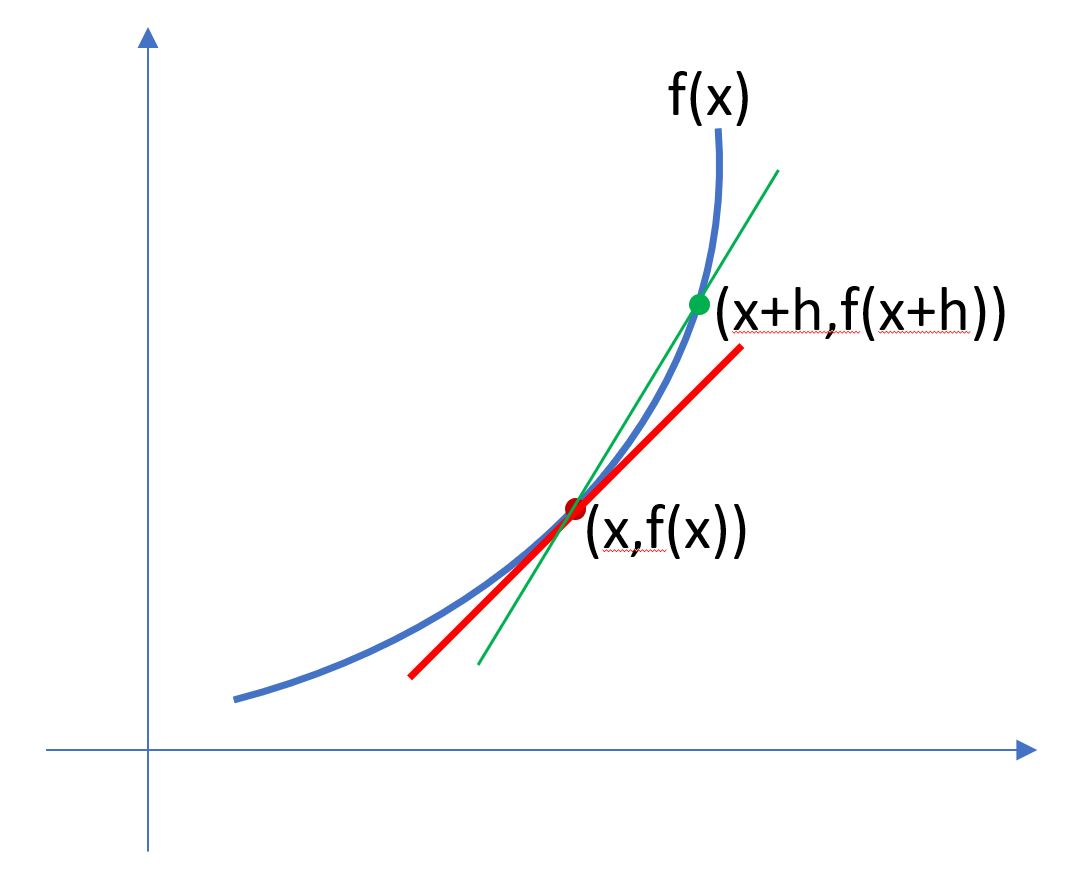
上圖藍色曲線的方程式,假設為 f(x),則(x, f(x))這個點的切線(紅色線)斜線為多少呢?。
首先x往右邊增加一個h的值,其y軸為f(x+h),所以綠色(割線)斜率為$(\frac{f(x+h)-f(x)}{h})$
當h往左邊靠,一直逼近x時,那就是紅色線的斜率 $(\lim_{h\to0}\frac{f(x+h)-f(x)}{h})$
把上面的那個式子,給予一個變數 $(f'(x)=\lim_{h\to0}\frac{f(x+h)-f(x)}{h})$, 則$(f'(x))$稱為導數
所以導數就是某個點的斜率。
假設$(f(x)=x^{2})$,則斜率為
$(\frac{f(x+h)-f(x)}{h}=\frac{(x+h)^{2}-x^{2}}{h}=\frac{x^{2}+2xh+h^{2}-x^{2}}{h}=2x+h)$
$(f'(x)=\lim_{h\to0}2x+h = 2x)$
也就是說,x=1時,斜率為2, x=2時,斜率為4
而$(f'(x)=2x)$ 正是 $(x^{2})$的微分,也就是說,導數就是切線,也就是微分後的函數
偏微分
上述的方程式,只有一元變數(x)。如果是多元呢,如下所示
$(f(x_{1},x_{2})=ax+1=\begin{bmatrix}10&1\end{bmatrix}\begin{bmatrix}x_{1}\\x_{2}\end{bmatrix}+1=10x_{1}+x_{2}+1)$
$(\bigtriangledown f(x_{1},x_{2})=\begin{bmatrix}\frac{\partial f(x)}{\partial x_{1}} \\ \frac{\partial f(x)}{\partial x_{2}}\end{bmatrix}=\begin{bmatrix}
\frac{\partial(10x_{1}+x_{2}+1))}{\partial x_{1}}
\\
\frac{\partial(10x_{1}+x_{2}+1))}{\partial x_{2}}
\end{bmatrix}
=\begin{bmatrix}
10
\\
1
\end{bmatrix})$
多次多元方程式偏微分
$(f(x_{1}, x_{2})=5x_{1}^{2}+2x_{2}^{2}+7x_{1}x_{2}+10x_{1}+x_{2}+1)$
偏微分後為 $(f'(x_{1}, x_{2})=\begin{bmatrix}
10x_{1}+7x_{2}+10
\\
4x_{2}+7x_{1}+1
\end{bmatrix})$
由上可推出,如果是2元方程式,就是2*1矩陣,如果是 3元方程式,就是3*1矩陣
梯度下降
梯度下降(Gradient Descent),目的是在使用逼近法尋找最接近的函數
import numpy as np
import pylab as plt
px=[1,0, -1]
py=[1, 0, -3]
reg=np.poly1d(np.polyfit(px, py, 1))
plt.plot(px, reg(px), color='green')
x=np.linspace(-1.5, 1.5, 2)
y=3*x+1
plt.plot(x, y, color='red')
plt.rcParams['font.sans-serif'] = ['Microsoft JhengHei']
plt.rcParams['axes.unicode_minus'] = False
plt.legend(['迴歸', '假設'] )
plt.scatter(px, py)
plt.plot([-4, 4], [0, 0], color='blue')
plt.plot([0, 0], [-4, 4], color='blue')
plt.xlim(-4, 4)
plt.ylim(-4, 4)
plt.grid(True)
plt.show()
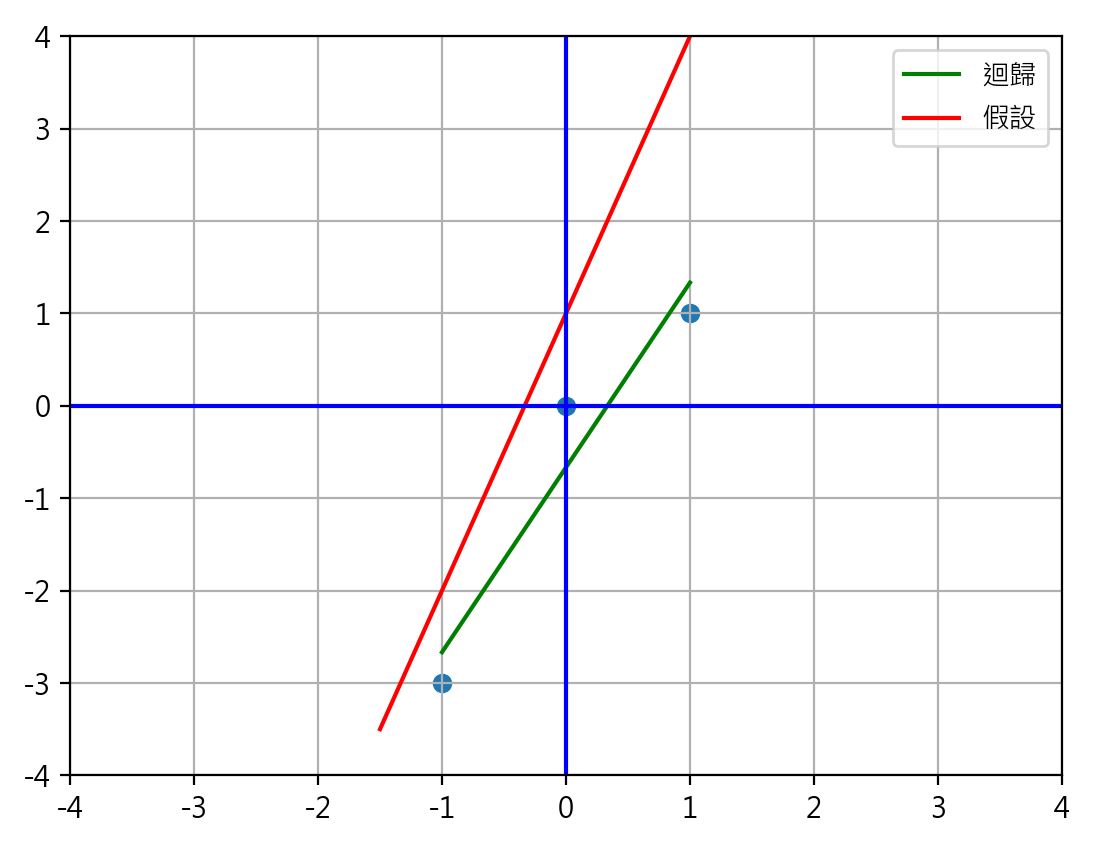
如上圖,假設有三個點(目標點)分別為(1, 1), (0, 0), (-1, -3)。如果我們要找一條線最接近這三個點。依以前的想法,那就是綠色那條迴歸線了。但迴歸線又是怎麼找出來的呢?
在此我們先隨便假設一條線,如紅色的 f1(x)=3x+1 這個函數。然後把三個點的x值代入f1函數,得到的y值如下
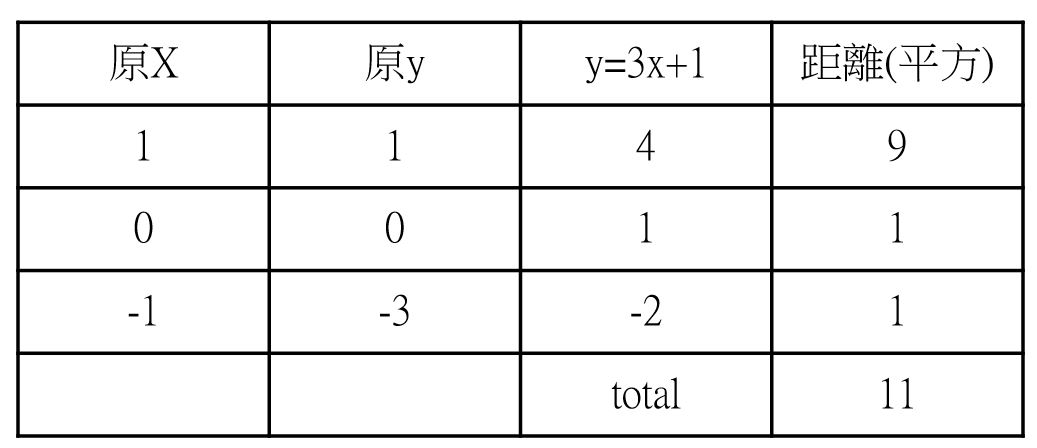
上述3x+1所求出的y值,與目標點的y值相減後的平方,加總為11。為什麼要平方呢? 這樣才不會有負值出現. 即總距離為
$(\sum_{i=0}^{i=n}(y_{ni}-y_{oi})^{2})$
$(y_{ni})$ 為目標點的y值,$(y_{oi})$ 為目標點的y值
這樣可以解釋迴歸線跟PCA的差異了吧。PCA是三點的投影距離總和的最小值。迴歸線是三點的y值與原點最小總值。
再以上例$(f(x)=x^{2}-10x+1)$為例,x為多少時,有最小極值呢。用上述的一階微階可知 $(f'(x)=2x-10)$,當x=5時,表示斜率為0,有極值,所以f(5)=-24。但較複雜的函數並不是都可以使用此方法求值。此時就要用逼進法(梯度下降)。
再以上述$(x^{(t+1)}=x^{t}-\gamma f'(x^{(t)})=x^{t}-\gamma (2x^{(t)}-10)=(1-2\gamma )x^{(t)}+10\gamma )$
$(\gamma )$ : 學習函數,每次要進步的值
$(x^{{t}})$ : 當下x的值
$(x^{{t+1}})$ : 下一次x的逼進值
$(\gamma )$ 的值複雜亦常,太大也不行,太小也不行,這又有一套理論,所以可以先跳過
損失函數
再以$(f(x)=x^{2}-10x+1)$為例
$(L=\sum (y-(x^{2}-10x+1))^2)$, 即 (目標點y-新點y)的平方總和。
加速度
距離與加速度的公式為 : $(S=v_{0}t+\frac{1}{2}at^{2})$
對t 進行一次微分後,就是某個時間點的瞬間速度了
$(v=v_{0}+at)$
https://chih-sheng-huang821.medium.com/%E6%A9%9F%E5%99%A8-%E6%B7%B1%E5%BA%A6%E5%AD%B8%E7%BF%92-%E5%9F%BA%E7%A4%8E%E4%BB%8B%E7%B4%B9-%E6%90%8D%E5%A4%B1%E5%87%BD%E6%95%B8-loss-function-2dcac5ebb6cb
時間膨脹公式
速度愈快,時間膨脹愈大
$(r=\frac{1}{\sqrt{1-(\frac{v}{c})^{2}}})$
todo
牛頓第二定律
F=ma
F:力量(N),m : 質是(kg),a: 加速度
todo
重力計算公式
g = $(\frac{G*M}{r^{2}})$
g: 重力加速度,G: 重力常數,M : 星球質量,r:離地心距離。
G = $(6.6743 * 10^{-11} \frac{m^3}{kg.s^2})$,此為固定不變
地球質量 : $(5.97 * 10^{24})$kg,太陽質量 : $(1.98855 * 10^{30})$kg
地球半徑: $(6.371 * 10^{6})$m,太陽半徑: $(6.955*10^{8})$m
地球表面重力加速度 = $(\frac{(6.6743 * 10^{-11})*(5.97*10^{24})}{(6.371 * 10^{6})^{2}})$ =9.8 $(m/s^{2})$。
太陽表面重力加速度 = $(\frac{(6.6743*10^{-11})*(1.98855*10^{30})}{(6.955*10^{8})^{2}})$=274.3$(m/s^{2})$
重力時間膨脹
重力也會讓時間變慢,公式如下
$(t=1+\frac{gh}{c^2})$
g=9.8
h=1000km=10^6m
c=299792458
t=g*h/(c**2)*(10**9)
則位於高空1000km處的衛星,時間會比地表快 0.11奈秒
todo
史瓦西半徑
$(r=\frac{2GM}{c^2})$
任何具有質量的物質都存在的一個臨界半徑特徵值。該值的含義是,如果特定質量的物質被壓縮到該半徑值之內,將沒有任何已知類型的力可以阻止該物質將自己壓縮成一個奇異點,也就是黑洞。在物理學和天文學中,尤其在萬有引力理論、廣義相對論中,它是一個非常重要的概念。這是1916年德國天文學家卡爾·史瓦西首次發現史瓦西半徑的存在,這個半徑是一個球狀對稱、不自轉又不帶電荷的物體。史瓦西半徑為這個物体的重力場精確解。
以太陽為例
$(r=\frac{2*(6.6743*10^{-11})*(1.98855*10^{30})}{299792458^2} = \frac{2*(1.98855*10^{30})}{(6.6743*10^{11})*299792458^2} = 2953.4m)$
也就是說,太陽在坍塌到 2953 公尺後,即會變成一個黑洞。地球則必需坍塌到0.8cm才會變成黑洞。